Counteracts vehicle instability
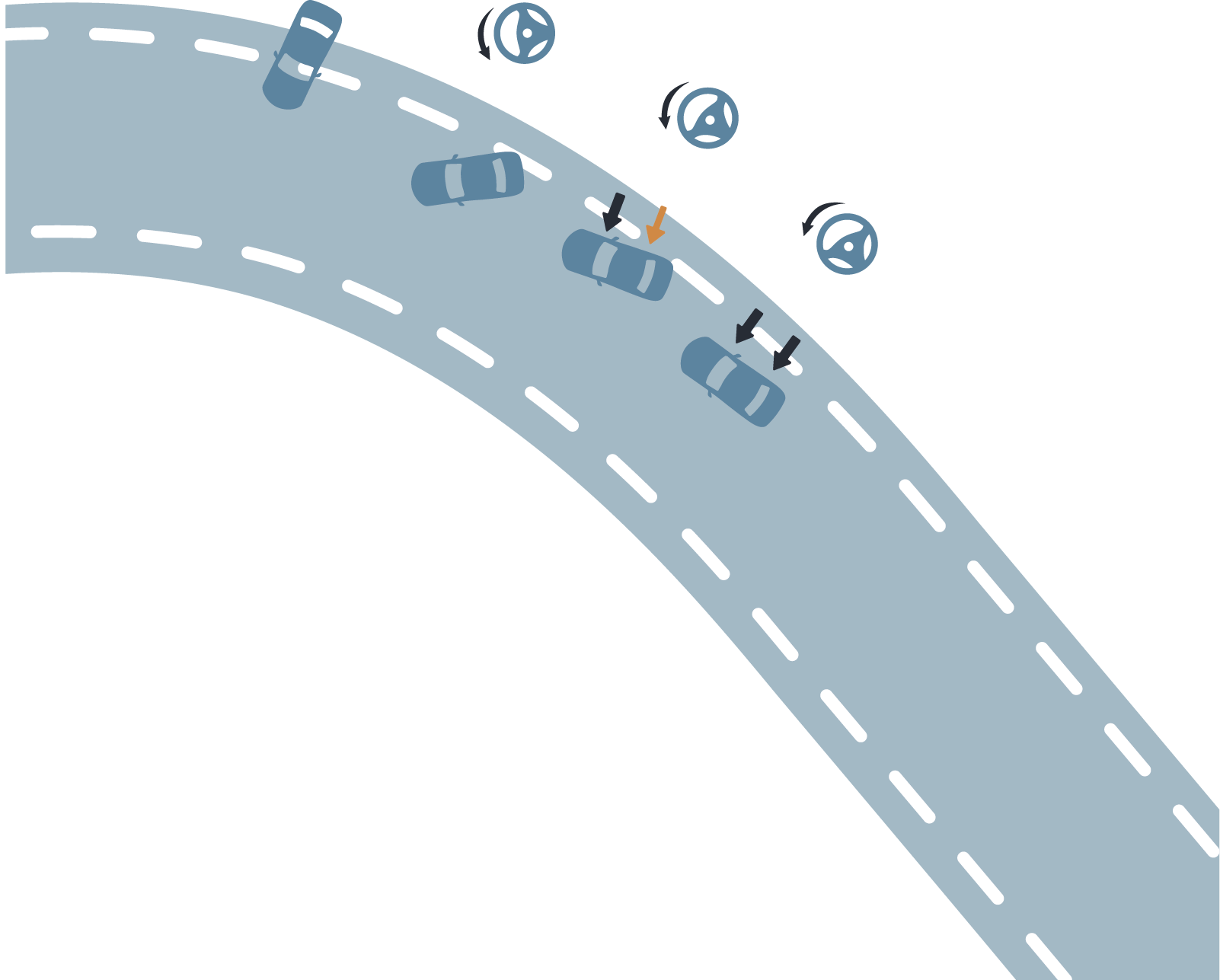
In an oversteer situation, e.g. due to a curved wet road, the vehicle is taken to the grip limit of the rear tyres, becomes unstable and undesirably changes its course. S+ Oversteer Control is a dynamic stability-control function that utilises steering control to effectively counteract yaw-torque instability. It also increases the performance of traditional oversteer control by braking (ESP).
Entering an oversteer situation, the driver tends to counter steer too late and too much, resulting in counter-skid, sometimes with fatal consequences. Stabilising the vehicle in an oversteer situation requires powerful and rapid steering-wheel movements that few drivers can manage.
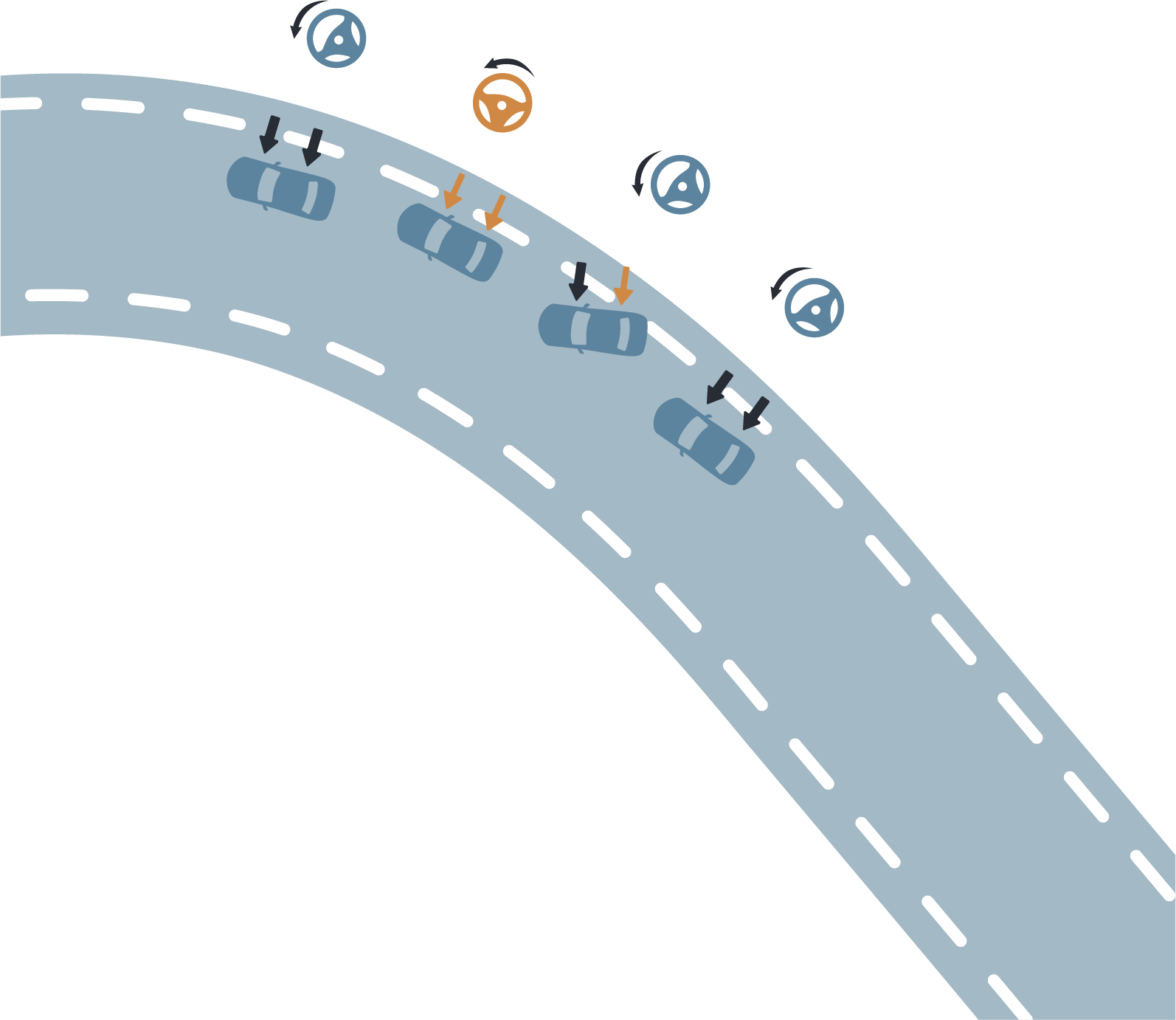
S+ Oversteer Control efficiently stabilises the vehicle by steering and even increases the performance of traditional oversteer control by braking.
Using S+ Oversteer Control keeps the vehicle on the driver’s intended path, i.e. on the road, avoiding road departure and veering into the opposite lane.
S+ Oversteer Control with integrated S+ Agile Steering controls the vehicle, resulting in much smaller steering-wheel turns during the oversteer compensation.
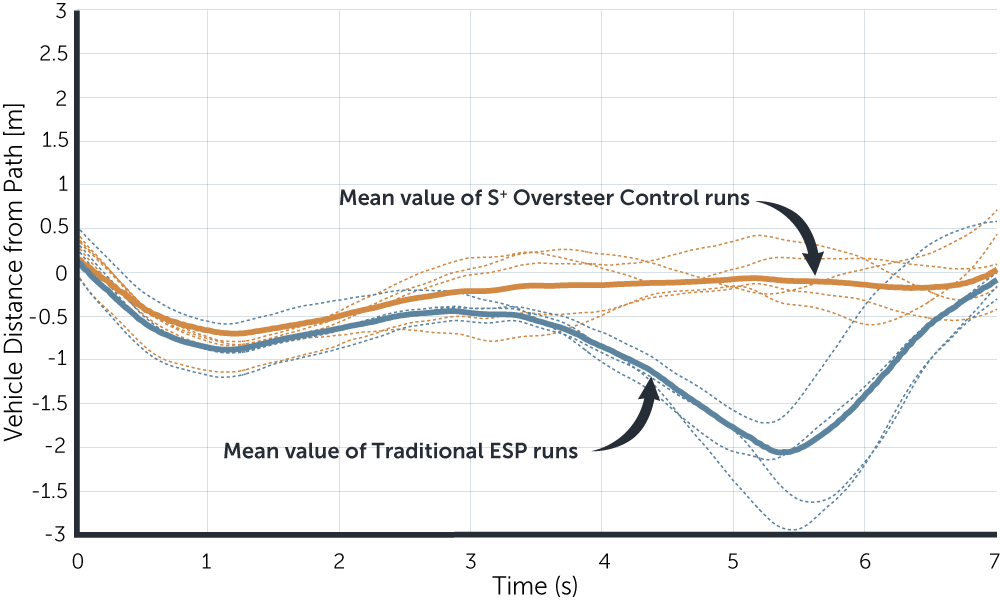
The difference between S+ Oversteer Control and traditional oversteer control by braking (ESP) is critical. Sentient’s test results show that with an initial oversteer speed of 82 km/h, the difference in displacement is 1.95 metres from the intended path. Using S+ Oversteer Control increases the chance of ending up inside the lane boundaries after an oversteer situation, avoiding a potentially fatal accident.